发布时间:2022-10-28 17:01

说到测绘近几年的”当红炸子鸡“是什么?无疑就是无人机航测了。机动灵活、作业范围广、成本低等特点让无人机航测越来越受到测量人的喜欢在地形图测绘工作中应用的越来越广泛了。
无人机航测在弥补了传统测绘不足的同时,也能在实现三维测绘时确保地理信息数据采集的时效性。例如,最近我国的几次重大事故,都是在第一时间使用了无人机航测对灾区现场进行勘测,掌握灾区现场情况进行救援。
好了,话不多说,今天就跟着小编一起了解一下无人机航测摄影测量。
无人机航测摄影测量
01
无人机航空摄影测量,顾名思义,即通过对无人机的应用,结合无线电遥控设备或机载计算机远程控制飞行等系统及全自动化摄影测量、GPS自动定位等先进技术,实现航测遥感数据的快速获取与同步处理。

无人机航测
无人机航测是传统航空摄影测量手段的有力补充,具有机动灵活、高效快速、精细准确、作业成本低、适用范围广、生产周期短等特点,在小区域和飞行困难地区高分辨率影像快速获取方面具有明显优势。
无人机航测拥有快速航测反应能力、突出的时效性和性价比、监控区域受限制小、地表数据快速获取和建模能力等特点让无人机行业应用也越来越广泛。例如国土局、测绘局、规划局、电力、水利、交通、消防、武警等行业及政府部门或企业的应用。
摄影测量和航空摄影测量
02
在说到无人机航空摄影测量之前,小编不得不需要说一下摄影测量和航空摄影测量。因为无人机航测可以理解为一个新的航空摄影测量工具,而航空摄影测量又是属于摄影测量的一个分支,三者的关系:

摄影测量的基本原理是三角测量,和经纬仪的三角测量时同一个原理。通过至少两个不同位置拍摄照片,从每个相机到物体上的点产生一个“视线(也叫可以叫光线)”,这些视线香蕉就会产生一个三维坐标。

关于摄影测量,小编强烈推荐张祖勋院士的摄影测量学讲课视频,对摄影测量感兴趣的同学可以观看一下视频。
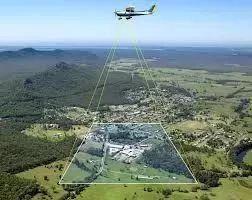
航空摄影测量(aerial photogrammetry)指的是在飞机上用航摄仪器对地面连续摄取像片,结合地面控制点测量、调绘和立体测绘等步骤,绘制出地形图的作业。简单来说就是在飞机上装摄像机进行拍照,获取影像数据,然后在进行绘图处理。
一般用于绘制1:500,1:1000,1:2000,1:5000,1:10000,1:50000等比例尺的地形图。
航空摄影测量单张像片测图的基本原理是中心投影的透视变换,立体测图的基本原理是投影过程的几何反转。上面说到了主要是在飞机上安装相机进行拍摄,拍摄照片也可以有两种形式,可以是垂直拍摄,也可以是倾斜拍摄。
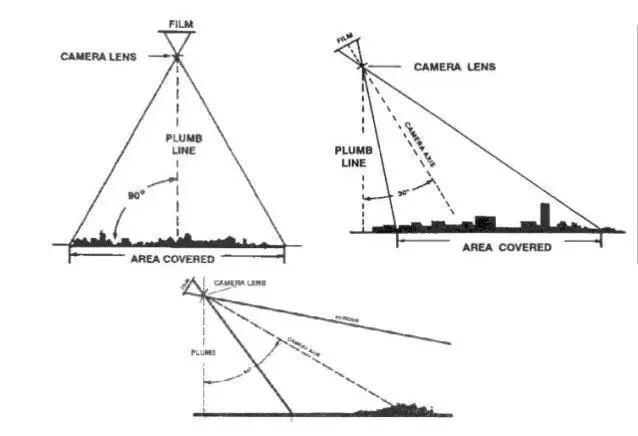
根据需要可以选择垂直拍摄,生成正射影像图,也就是平面的。选择倾斜拍摄,生成的就是3D影像图。
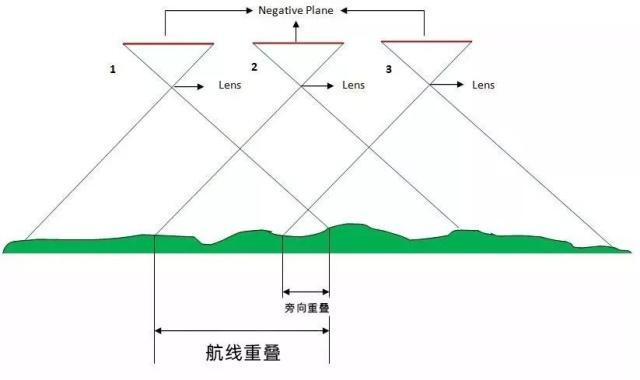
但是,不管怎么拍摄都有一个很重要的点,在前面说摄影测量的时候也说了就是在同一个点,至少要拍摄两张以上的照片,这就要在飞机飞行拍摄照片时考虑到重叠率的问题。
航空摄影测量小编就先说到这里了,接下来说一说无人机航空摄影测量。
无人机航测的发展历程
03
以下文字有点多,大家记住几个关键节点就好了。1839年发明了摄影术,1903年发明了飞机,1917年无人驾驶飞机出现,1979年最早的固定翼无人机摄影测量实验,1980年最早的旋翼无人机摄影测量实验。
从1839年尼普斯和达意尔发明摄影术,摄影测量到现在也有180多年的历史。1851至1859年期间,法国陆军提出和进行了交会摄影测量,这是摄影术开始应用于测量的关键。但是直到1903年后,莱特兄弟发明飞机后,航空摄影测量成为可能,无人机航测也称为了可能。
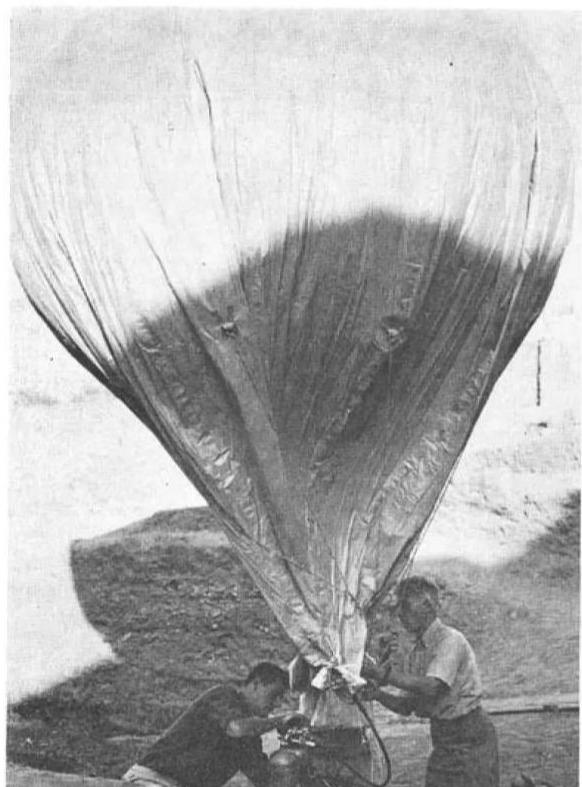
在使用无人机进行航测之前,人们尝试过用热气球、风筝,甚至说是用鸽子从空中拍摄地面的照片...当然这些都是为了拍照进行间谍活动,而不是为了测量。
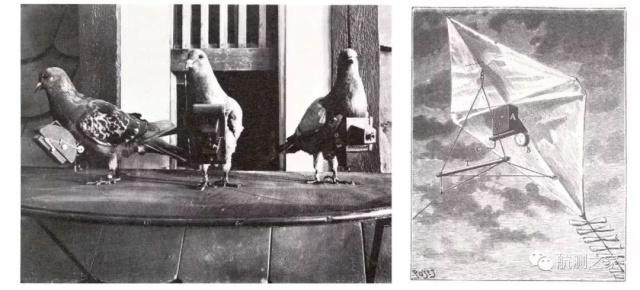
这里顺便再科普一下,世界上第一张航拍照片是1858年由Gaspard Tournachon在巴黎从有人驾驶的气球上拍摄的。后来相机技术的简化,1882年英国气象学家ED Archibald用风筝来进行航空摄影,1897年,瑞典人Alfred Nobel用火箭来进行航空摄影。
1909年,莱特兄弟在自制的飞机上拍摄了航空照片,人们十分震惊,都期待着有朝一日自己能飞上天拍照。但是,碍于当时欧洲的背景,载人航空航拍迅速的成为了军事领域的热门工具,主要还是用于战争。

莱特兄弟
直到1917年,历史上第一架无人驾驶飞机出现了,这架无人机叫Ruston Proctor Aerial Target。是用无线电控制的无人驾驶飞机。但是起初研发它是用来充当飞行炸弹的,虽然这架无人机发射失败了几次,一直没有上场过,但是也为后期的无人机应用铺平了道路。
直到1979年,无人机在开始在航空摄影测量领域崭露头角,由Przybilla和Wester-Ebbinghaus用无线电手动控制固定翼无人机,配备光学相机,完成了最早在摄影测量中使用固定翼无人机的实验之一。

这架测试的固定翼无人机是由Hegi公司生产的,机长3米,翼展2.6米,飞机可携带最大的有效载荷为3kg。但是因为飞机飞行速度的原因,影响了发动机振动,导致图像成像较差。于是,这两人就想着用振动影响较小模型直升机,也就是旋翼无人机来进行拍摄任务。
1980年,Wester-Ebbinghaus成为了第一个使用旋翼无人机进行摄影测量的人,这次使用测试的无人机是来自Schlüter的模型直升机,如果对飞机感兴趣的朋友应该就能认出这款模型机是Bell222的模型。

这次测试的旋翼无人机携带了一个中画幅相机,并且使用了聚苯乙烯材质的墙板,Wester-Ebbinghaus的这番操作成功的压制住了发动机振动。
在这两次实验后,诞生了一个新的名词,UAS(Unmanned aerial systems ),无人机控制系统。UAS最主要的三个部分就是无人驾驶飞行器、地面控制站和通信数据链路。在后期无人机航测发展时,不同公司也都推出了自己的UAS系统,后面可能会讲到。
1998年,Tokmakidis为了考古应用,在相机上配备了旋转结构,可将相机旋转至90度。最后可以生成正射影像和2D平面图。
2000年,Zischinsky使用模型直升机(旋翼无人机)拍摄的图像加上地面拍摄的图像生成了建筑物的3D模型。
2001年,日本Yahama公司的RMAX旋翼无人机系统配备了DGPS(差分GPS)系统,
当时定向飞行轨迹的位置的3D精度可以达到0.3m(滚动)和0.1°(俯仰)/ 0.2°(偏航)。

Rmax系统旋翼无人机
以上都是属于早期的无人机应用于航空摄影测量,此时无人机系统还只是通过无线电链路或绳索手动控制,并且无人机不能精确转向,通常只能用少量的图像进行后处理。但是虽然早期的无人机航测不够成熟,但是却已经显示出很高潜力了,人们也更加看重发展无人机航空摄影测量。
随着无人机的发展,无人机的有效载荷也能变得更高了。在2004年伊斯坦布尔举行的第20届ISPRS(国际摄影测量与遥感学会)大会上,Nagai提出了一个系统,它将LiDAR(激光雷达)系统和CCD摄像机与GPS / INS数据集成在一起,用于数字化表面模型生成。在此之前,人们都是通过不停的更换更专业相机来提升无人机测量质量,这次也是首次提出了无人机负载LiDAR仪器进行测量。
同年,还提出了固定翼无人机系统Pegasus,这是一种用于遥感的长续航无人机系统。为什么说他是长续航呢,因为它使用的是太阳能作为无人机的电源。与此同时,我国的测绘科学研究院开发了一种固定翼迷你无人机系统。用来从图像中重建建筑物的三维模型。
2004年至2007年期间,固定翼无人机和旋翼无人机在行业中得到广泛的应用,像自然资源管理和监测,包括植被监测、高光谱无人机图像分类、精准农业等;也有环境监测/检查,包括交通监测、道路跟踪、森林火灾监测、河流监测等行业领域。
但是。在实际应用中,无人机虽然获取任务区域的图像十分容易,但飞行性能和拍摄图像的质量依然不够理想。主要是因为无人机飞行模式的原因,无人机系统中的导航单元需要和飞行计划的组件校准。
之后,有一个人叫Niranjan,他为了让一架无人机满足精准农业、灾害管理、石油和天然气管道监测、建筑工程、土壤剧变和侵蚀、水涝表面等等还有其他的一些行业总计数十种行业应用,他设想出一种固定翼无人机原型,什么样的呢?最大飞行半径应大于2500km,续航时间大于24h,而操作高度在100m-6000m之间的固定翼无人机,但是没有人愿意研发。
2007年,瑞士大学的一个测量小组开始了四旋翼无人机的研究。

DJI M210四旋翼无人机
2006年,Wzorek等人提出了GSM技术作为无人机的通信媒体。当时用索尼爱立信的手机和RMAX无人机来进行测试和演示的,可以实现在手机上编辑飞行计划、切换到摄像机视图、显示日志消息、插入和删除禁飞区等功能,还可以发送飞行命令,例如飞到喜欢的位置或航点,开始任务,起飞降落等。
这次试验证明了GSM技术作为无人机通信媒体的实用性,在无人机其他通信评率卡住的情况下,GSM技术能提供良好的冗余系统替代方案。但是,最最最重要的是就是可以低成本的使用互联网。
在2004年至2007年期间,无人机的发展更趋向于低成本和小尺寸系统,并且集成各种传感器于一体。
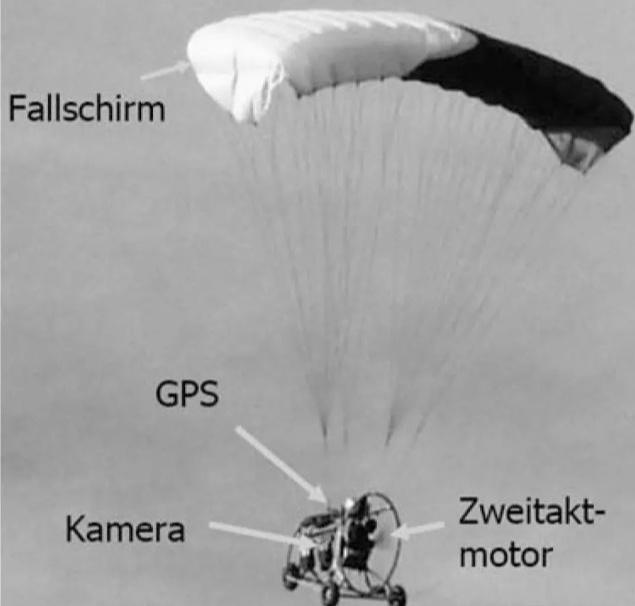
2008年,Grenzdrffer等人尝试使用动力滑翔伞来拍摄图像数据,用来对比固定翼无人机拍摄的图像数据。
2009年,无人机搭载LiDAR仪器又得到了进一步的发展,图为侦察机B1-100配备了Riegl机载LiDAR扫描仪LMS-Q160。

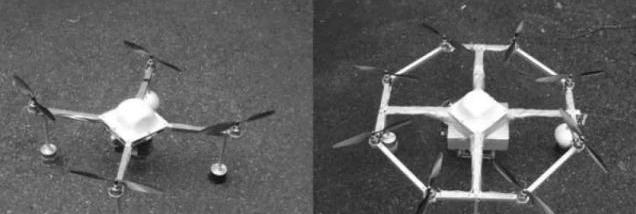
同年,2009年,Niethammer等人开始使用开源无人机系统来监测缓慢移动的滑坡, 这种无人机系统的特点是它可以与四个或八个单独的动力螺旋桨一起工作,即使其中一个电机发生故障也可以安全着陆。
2007年至2009年期间,无人机航测的发展重点是摄影测量中使用的不同传感器在无人机平台中的实现、集成和同步。期间的研究主要集中在需要高分辨率和高精度的应用,以及专注于快速处理的应用。
总结
04
关于无人机航测的早期发展,小编就先说到这里了。
从无人机的历史发展来看,战争以及军事目的是推动无人机的出现与发展的决定性因素。其实这也与其他许多新生事物的出现是类似的。
但是随着时代的发展和无人机与数码相机技术的发展,基于无人机平台的数字航摄技术已显示出其独特的优势,无人机也逐渐从军事向民用领域发展。
在民用领域,无人机低空摄影测量技术的快速高效、机动灵活、分辨率高、处理速度快、运行成本低等特点使得无人机航测在国家基础测绘、数字城市建设、生态环境监测、国土资源治理等领域如鱼得水。
近年来,随着我国科学技术的不断进步和发展,我国无人机技术也获得了突飞猛进的进步,对于小型无人机来说,无论是飞行时间、飞行质量,还是飞行技术都有了很大的突破,无人机航测也成了我国乃至全世界最受欢迎的低空遥感方式了。





